10.7.1Stability domains of Adams methods¶
See here for the schemes
For stability we require the roots of
to be less than one
We find the values of for which
import numpy as np
from matplotlib import pyplot as pltdef AB2(theta):
w = np.exp(1j*theta)
return (w**2 - w)/(3.0*w/2.0 - 1.0/2.0)
def AB3(theta):
w = np.exp(1j*theta)
return (w**3 - w**2)/(23.0*w**2/12.0 - 4.0*w/3.0 + 5.0/12.0)theta = np.linspace(0,2*np.pi,1000)
z = AB2(theta)
plt.plot(np.real(z),np.imag(z))
z = AB3(theta)
plt.plot(np.real(z),np.imag(z))
plt.legend(("AB2","AB3"))
plt.grid(True)
plt.xlim([-2, 1])
plt.ylim([-1, 1])
plt.axis('equal');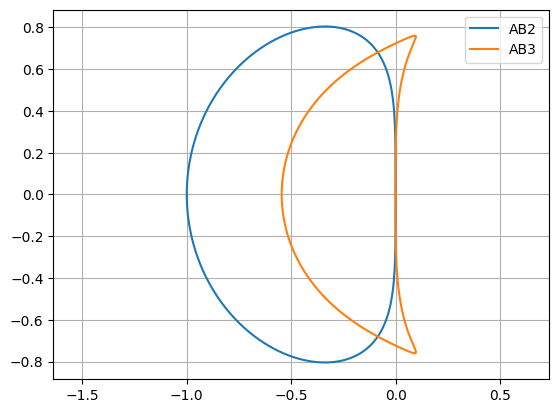
def AM3(theta):
w = np.exp(1j*theta)
return (w**2 - w)/(5.0*w**2/12.0 + 2.0*w/3.0 - 1.0/12.0)
def AM4(theta):
w = np.exp(1j*theta)
return (w**3 - w**2)/(3.0*w**3/8.0 + 19.0*w**2/24.0 - 5.0*w/24.0 + 1.0/24.0)z = AM3(theta)
plt.plot(np.real(z),np.imag(z))
z = AM4(theta)
plt.plot(np.real(z),np.imag(z))
plt.legend(("AM3","AM4"))
plt.xlim([-7, 2])
plt.ylim([-4, 4])
plt.grid(True)
plt.axis('equal');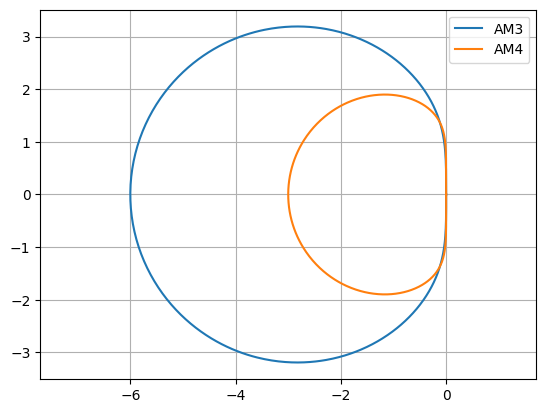
These discs are bigger than those for the AB methods, but they are also not A-stable methods. The imaginary axis is not contained in their stability domains, so these methods cannot be used for hyperbolic problems.
10.7.2Stability domains for BDF methods¶
See here for the schemes
Backward differentiation formula
def BDF1(theta):
w = np.exp(1j*theta)
return (w-1)/w
def BDF2(theta):
w = np.exp(1j*theta)
return (w**2 - 4.0*w/3.0 + 1.0/3.0)/(2.0*w**2/3.0)
def BDF3(theta):
w = np.exp(1j*theta)
return (w**3 - 18.0*w**2/11.0 + 9.0*w/11.0 - 2.0/11.0)/(6.0*w**3/11.0)
def BDF4(theta):
w = np.exp(1j*theta)
return (w**4 - 48.0*w**3/25.0 + 36.0*w**2/25.0 - 16.0*w/25.0 + 3.0/25.0)/(12.0*w**4/25.0)z = BDF1(theta)
plt.plot(np.real(z),np.imag(z))
z = BDF2(theta)
plt.plot(np.real(z),np.imag(z))
z = BDF3(theta)
plt.plot(np.real(z),np.imag(z))
z = BDF4(theta)
plt.plot(np.real(z),np.imag(z))
plt.legend(("BDF1","BDF2","BDF3","BDF4"))
plt.xlim([-1, 18])
plt.ylim([-8, 8])
plt.grid(True)
plt.axis('equal');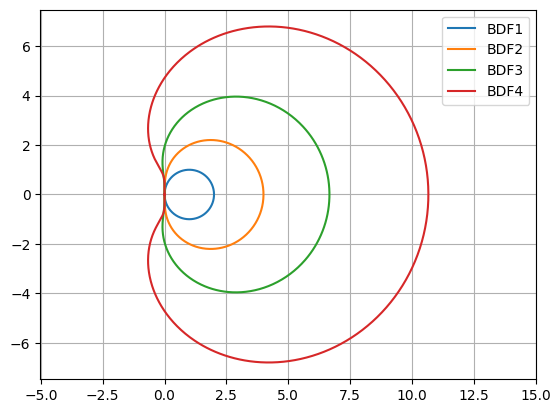
The region of asymptotic stability is the exterior of these discs. Only the BDF1 and BDF2 discs are entirely to the right of the imaginary axis and these are A-stable.